During the first lockdown I got around to watching the General Magic documentary. Having worked in the mobile industry for practically all my career so far, I am not surprisingly fascinated by the history of the technology and the repeated roads not taken. General Magic was a spinoff from Apple in the 1990s that tried to develop an operating system for general-purpose mobile computing devices, considered a touchstone of Valley culture and a training ground for people who went on to greater things elsewhere.
The documentary left me a bit baffled as to why anyone cared this much. The story, and indeed the company, is grossly insular; if all you had was this you’d be unaware that actual, working, commercial GSM networks were rolling out all around the world throughout. It doesn’t mention Nokia, Ericsson, and damningly, seeing as the point was mobile computing rather than networks it doesn’t mention Psion or even RIM even once. The world beyond America, or hell, even Northern California is only mentioned because they signed up one of the Japanese carriers as a distribution partner.
That said it doesn’t leave very much doubt about how they came to fail. Although they had exciting Apple-y concept drawings, almost everything you see in the movie is about software and software development. When the gadgets show up they are incredibly uninspiring lumps of undifferentiated grey plastic.

(Credit where credit’s due.) Compare, if you like, this Ericsson R250 Pro from 1999:
A glorious rugged device. The @Ericsson R250s PRO (1999). Supported GSM phase 2+ tech & GSM Pro system, which combined advantages of GSM phones with Private Mobile Radio (PMR) functionality. 135 hours of standby time, or eleven working days (twelve hours/day). #MobilePhoneMuseum pic.twitter.com/87lIqC32Gn
— MobilePhoneMuseum (@phone_museum) July 22, 2020
Like all the best industrial design, not only does it show you the affordances it gives you, it positively demands that you reach out and explore. The R250 Pro was nearly purely voice-centric, but what about this Psion Series 5MX?
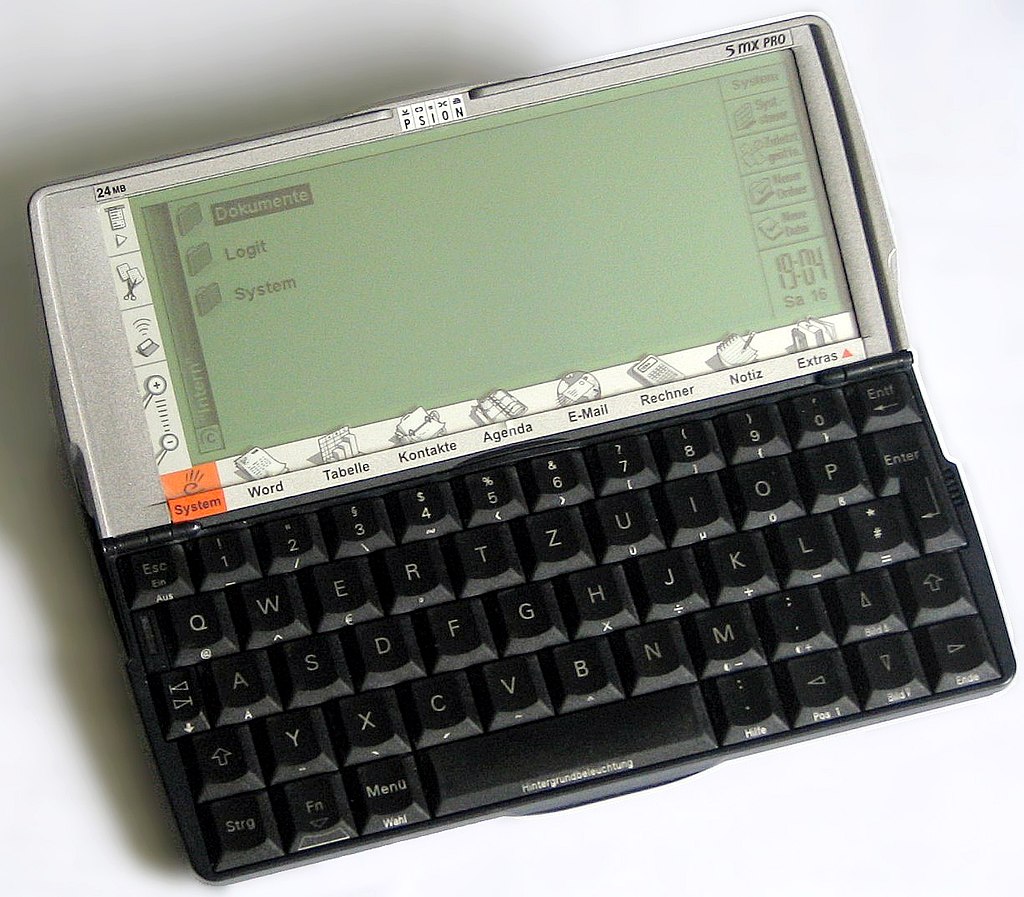
(Wikipedia credits)
The lameness of the hardware, in fact, was an important tell. This was the era when Microsoft and Intel ruled the world, based on the doctrine that hardware and software were not just independent, but the hardware was basically uninteresting and generic except for the annual Moore’s law increment.
Many tried to create Microsoft Windows, but mobile, not least Microsoft’s Windows division, but it didn’t happen. Symbian, the heir of Psion, was basically ripped apart by the tension between integration with Nokia’s devices and the need to support the other partners, while doing so on a commercial, closed-source basis, at least in David Wood’s telling. (I notice that I never did the review of his book Smartphones and Beyond, so you’ll have to content yourselves with this thread). Eventually, Apple triumphed by re-integrating hardware and software, while Google and its partners in the Open Handset Alliance swept up the rest by giving away the software as an open-source project.
What both parties also grasped was that mobile computing would always be a minority sport while the only people developing applications for it were, in a word, weirdos, a tiny pool of specialists. Success would mean giving the vast pool of Web developers tools for mobile devices. This was something General Magic missed comprehensively; even working in the Valley in the late 90s, they somehow failed to notice that this web thing would be important.
The second failure documentary I watched in lockdown was this one on Google-backed startup Makani, which set out to build a kite-borne wind turbine but somehow mission-crept into building a kite-borne wind turbine that was also a highly aerobatic VTOL flying-wing convertiplane. Well, if you’re reading this blog you’re probably the target audience for one of them!
The basic idea was good – there’s a dependable, positive relationship between wind resource and height, so carrying a turbine higher into the sky reliably generates more electricity for a given investment of resources – but at every turn the Makani engineers seem to have chosen the most baroquely complex option that was available.
For a start, you might think such a thing would rise into the air pulling on the tether and pretty much stay there while the wind spins the turbine. That wasn’t enough. A sailing vessel sails fastest on a reach, across the wind, with its sails acting as an aerofoil and the keel countering the drift to leeward, and the resultant of those two forces driving it forward. They had the insight that the same physics would also apply to the kite and considerably increase the power available, and then the further insight that it would also work in the vertical plane, so the gadget had to pull a continuous figure-of-eight manoeuvre.
Tough, but these folk were not going to be deterred by mere difficulty. They were all obsessed with windsurfing, which gave the whole project that distinctly Valley flavour of being a idealistic mission, a profitable opportunity, and a healthily windburned outdoor activity all at once. They started off by designing the aircraft as a flying-wing, thus giving themselves one of the worst challenges in aeronautics right out of the gate. Although a tailless wing is theoretically close to optimal on all sorts of measures, it’s extremely difficult to make it stable. Northrop took forty years to get from the atrocious B-49 to the B-2, which is still about the only such aircraft that works. Not surprisingly, the thing repeatedly slammed into the ground at high speed until they gave up and tried the conventional configuration that is, after all, the Wright brothers’ enduring legacy to aviation.
This experience wasn’t enough, either. They were determined that it should take off and land vertically, thus committing themselves to an even more demanding challenge in aeronautics. The solution they adopted required the following flight control modes: fixed-wing gliding (but tethered) flight, rotary-wing flight in autorotation (the helicopter equivalent of gliding), powered hover and taxi, and also fixed-wing glide without the tether. You may be ahead of me in guessing that this last was included as a reversionary mode for when the others failed, and indeed it was, after another series of expensive disasters. By this time the disasters were getting truly spectacular as the prototypes were really quite substantial machines with eight (I think? in any case there were too damn many) combined rotors/turbines, a long high-aspect ratio wing like something off a U-2, and a similarly long and skinny vertical stabilizer, plus quite a few fins, some of which pointed downwards in order to capture additional Hush-Kit blog energy.
So, to sum up the mission concept, the aircraft would sit on its tail on a specially constructed tower (adding tail-sitting, another classic from the museum of terrible aviation ideas, to the list), spin its excessive number of rotors up with ground power, soar vertically into the air, push over into level flight and transition to the glide, do its wind turbine kite aerobatics thing, and then, when it was done kiting, pull to the stall and transition to autorotation hanging on the rotors/turbines to make its approach, then transition to the hover.
However, it didn’t then land as such. Rather, it was grabbed out of the sky by a robotic crane that restowed it on the…perch? it launched from. This reinvented a classic British weird aviation idea from the 1980s, the BAe Skyhook project, which wanted to carry Sea Harriers in twos aboard navy frigates and launch them by craning them outboard, bringing the engine to hovering power, and then letting go, reversing the operation to recover them. This was never implemented because it was a stupid idea for a host of reasons, not least the controls engineering problems of doing this aboard a ship rolling wildly in the winter North Atlantic. The kite wasn’t just a lump of dead weight but an aircraft hovering, with its flight controls making constant adjustments to keep over the spot, and all kinds of difficult-to-debug problems arose with the interaction between the control law for the kite and that for the crane, reminding everyone of why the founders of cybernetics ended up quite that weird.
Around about this time the team seemed to grow dramatically, and the newcomers the videographers spoke to all seemed to be controls engineers. (“So, what are you working on?” “Controls, and I’d like to introduce…” “And yourself?” “Controls.” “Oh, here’s so and so, who’s..” “I’m sorry, I can’t talk now, we’re having a meeting about controls..”)
What I would have really liked to know at this point was what on earth the drivers of these decisions were. Just having the thing set down on a pad like a helicopter, shut down, and then be stowed would have cut a lot of complexity. They wanted to deploy it on a structure at sea – like an offshore wind turbine – but offshore turbines often do have a helipad. The landing roll in glider mode seemed pretty short, so did they even need to make it do gross, thrashing helicopter stuff at all?
When they actually took a prototype to sea, there was a distinct sense of cultural and indeed technical incomprehension between the kite team and the Norwegian marine engineers who installed it, possibly down to the point about the pad as after all they built and maintained offshore wind farms every day of the week.
If there’s a lesson here it’s about the tendency to go completely overboard on doing stuff because it’s cool and over-solving the problem. The wind power industry actually did achieve much of what Makani set out to by making the turbines taller. Also, it’s possible to have too many rotors, fins, and controls engineers.
Of course there’s another classic Valley failure mode, which is just the CEO going completely bat-shit insane. This Bloomberg Businessweek piece nails it right at the beginning with the remark that Magic Leap might be working on augmented reality but its CEO was living in an alternative one.
A TEDx Talk in 2012 titled “the synthesis of imagination” consisted entirely of Abovitz wordlessly dancing around in a spacesuit alongside several people in furry monster outfits. Another video showed a life-size whale splashing through a school gymnasium.
They were determined that it should take off and land vertically … The solution they adopted required the following flight control modes: fixed-wing, gliding (but tethered) flight, rotary-wing flight in autorotation (the helicopter equivalent of gliding), powered hover and taxi
The psychopter claims another victim. (“What is the Psychopter? It is the winged self. It is that which the helicopter usurped — and what the helicopter was finally revealed not to be.”) See also the UFO connection.
One quibble. The Magic Cap devices came out in 1994 and February 1995. The Ericsson and Psion devices are from 1997 and 1999.
Magic Cap seemed more like an early-90s company, with the latter 6 years being their zombie mode after the devices failed but they were still trying to find a business model.
More prosaically – and you can say this about SpaceX – there’s a kind of cartoon reality to the kinds of solutions that these systems try to approximate.
It’s true, too much TV really does warp your brain.
I don’t mind the cartoonish whizzyness, what I’m worried about is when we get onto Harry Potter-driven development. I’m surprised Amazon Web Services doesn’t already have a managed sorting hat service.